Für eine feldorientierte Regelung bei PMSM- und BLDC-Motoren muss die Winkelposition des Rotor-Magnetfelds bekannt sein. Üblicherweise erfolgt dies mit einer Winkelpositionssensorik im Motor, z.B. mit Hallsensoren oder optischen Encodern. Der Begriff sensorlos meint hier, dass auf die genannte Sensorik im Motor selbst verzichtet werden kann. Dies hat viele Vorteile. Speziell bei Kompaktmotoren reduzieren sich der Platzbedarf und die Anzahl Anschlusskabel und Steckkontakte, was z.B. in der Medizinaltechnik grosse Vorteile bringt. Zudem verbessern sich die mechanische Stabilität und Rotordynamik – und damit die Maximaldrehzahl, da man für den Winkelpositionssensor keine zusätzlichen Scheiben oder Magnete benötigt. Da mit dem Sensor eine ausfallanfällige Komponente weniger vorhanden ist, steigt auch die Zuverlässigkeit des Gesamtsystems.
Verschiedene sensorlose Regelungsverfahren
Mittlerweile existiert eine grosse Anzahl an unterschiedlichen Verfahren, um den sensorlosen Motorbetrieb zu realisieren. Diese können bezüglich Realisierungsaufwand in folgende drei Kategorien unterteilt werden:
- Nulldurchgangserkennung (zero-crossing-detection, ZCD)
- beobachterbasierte Regelung (Observer)
- Messung der positionsabhängigen Induktivitätsänderung (induktivitätsbasiert)
Nulldurchgangserkennung – ZCD
Beim Verfahren der Nulldurchgangserkennung detektiert man, wann die im Motor induzierte, positionsabhängige Gegenspannung ihr Vorzeichen wechselt. Ein typischer Systemaufbau ist in Bild 1 gezeigt. Geeignete Betriebsarten, um eine Nulldurchgangserkennung zu gestatten, umfassen eine 120°-Blockkommutierung (auch six-step oder BLDC-Ansteuerung genannt) und/oder ein Puls-Amplituden-Modulation-(PAM-)Verfahren.
Für die Kompensation der 30° zwischen Nulldurchgang und Sektorwechsel gibt es verschiedene Verfahren – meist basierend auf Filterung, Integration oder Timern. Das ganze Verfahren ist von der Gegenspannung des Motors abhängig, welche proportional zur Drehzahl ist. Typische Minimaldrehzahlen liegen daher bei 5 bis 10 Prozent der Nenndrehzahl, darunter muss aufgrund der fehlenden Spannung ungeregelt gefahren werden.
Beobachterbasierte Regelung – Observer
Beim Oberserververfahren läuft, basierend auf den Systemgleichungen der Maschine, ein Beobachter mit. Aus einem Vergleich der erwarteten Motorzustände aus dem Observer mit den gemessenen Werten kann der tatsächliche Zustand und damit die Rotorposi-tion und die Drehzahl ermittelt werden.
Hierfür eignet sich besonders die Sinuskommutierung (PWM oder Raumzeigermodulation), die eine Berechnung der Klemmenspannungen ohne Messungen erlaubt, wie in Bild 2 gezeigt. Ferner muss man beachten, dass auch dieses Verfahren letztlich die Information bezüglich der Rotorlage aus der Gegenspannung der Maschine detektiert, und daher ebenfalls erst ab einer gewissen Minimaldrehzahl funktioniert.
Induktivitätsbasierte Methoden
Die Gegenspannung der Maschine wird bei tiefen Drehzahlen sehr klein und schwierig zu messen (und verschwindet bei Stillstand ganz). Daher lassen sich ZCD und Observer für diesen Fall nicht einsetzen. Die Induktivität einer Maschine ist meist abhängig von der Winkelposition und lässt sich auch im Stillstand mittels Anlegen eines Testsignals (signal injection) messen. Die einfachste Art, das Testsignal anzulegen, ist mithilfe des Umrichters, der auch die Antriebsströme regelt. Der entsprechende Systemaufbau ist in Bild 2 ersichtlich.
Grosse Herausforderungen für die Standardverfahren
Bei Standardantrieben funktionieren ZCD- und Obserververfahren meist gut. Jedoch sind diese Standardverfahren bei gewissen Herausforderungen schnell am Anschlag:
- Bei sehr schnellen Beschleunigungen sind Nulldurchgänge bei Standard-ZCD aufgrund hoher Ströme (und daher langen Kommutierungswinkeln) und wechselnden Drehzahlen innerhalb eines Sektors nicht mehr detektierbar.
- Bei hohen Drehzahlen steigt auch die absolute Minimaldrehzahl – relativ bleibt sie z.B. bei 10 Prozent.
- Obserververfahren können bei Beschleunigungen Vorteile bringen, jedoch steigt mit der Drehzahl auch die benötigte Rechenkapazität, weshalb dies für Drehzahlen über 100 000 min–1 mit Mikrokontrollern üblicherweise keine gangbare Lösung mehr ist.
Genaue Messungen und Regelalgorithmen
Falls man mit dem gleichen Motor sehr hohe und sehr tiefe Drehzahlen sensorlos regeln will, muss eine induktivitätsbasierte Methode zum Einsatz kommen. Motoren für hohe Drehzahlen sind jedoch sehr symmetrisch aufgebaut und zeigen nur minimale Induktivitätsänderungen, was sehr genaue Messungen und Regelalgorithmen erfordert.
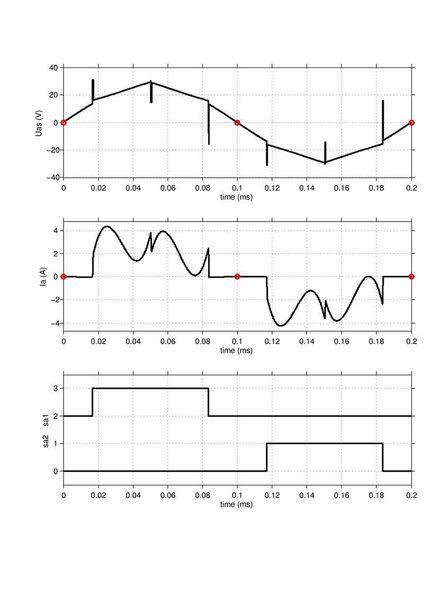
Verbesserte ZCD-Verfahren wurden in den letzten Jahren entwickelt, welche sowohl bei hohen – bis Weltrekord 106 min–1 – als auch tiefen Drehzahlen – je nach Motor bis auf 1 Prozent Nenndrehzahl – funktionieren. Zudem sind diese Lösungen auch sehr schnellen Beschleunigungen und hohen Strömen gewachsen. Typische Strom- und Spannungsverläufe mit einem solchen ZCD-Verfahren in einem PAM-Umrichter von Celeroton bei 300 000 min–1 sind in Bild 3 gezeigt.
Obserververfahren werden in der Forschung seit einigen Jahren intensiv bearbeitet und bei Standarddrehzahlen auch industriell eingesetzt. Neue, vereinfachte Observer funktionieren bis 150 000 min–1. Ein Drehzahlsprung mittels eines solchen Observers von 50 000 auf 100 000 min–1 ist in Bild 4 grafisch dargestellt. Induktivitätsbasierte Verfahren sind bis anhin eher in der Forschung als in der Industrie ein Thema. Neuartige Verfahren erlauben eine Positionsdetektion auch bei Motoren mit sehr grosser Symmetrie – kleine Schenkligkeit. Dies gestattet das Beschleunigen und Regeln ab Stillstand und ist auf verschiedene Motoren anpassbar.
Fazit
Zusammenfassend lässt sich festhalten, dass die neuen, sensorlosen Regelungsverfahren die Erkennung der Winkelposition von Stillstand bis Maximaldrehzahl gestatten. So lässt sich über den ganzen Drehzahlbereich volles Moment fahren, und zwar ohne Hallsensoren oder Encoder. Dies vereinfacht das Motordesign und erhöht die Zuverlässigkeit.
Infoservice
Celeroton AG
Technoparkstrasse 1, 8005 Zürich
Tel. 044 250 52 20, Fax 044 250 52 29