Nach den europäischen und amerikanischen Arbeitsschutzvorschriften gilt selbst eine noch so unwahrscheinliche Fehlfunktion in der Hard- oder Software einer Robotersteue-rung als mögliches Risiko. Daher muss, sobald die Tür zu einer Roboterzelle geöffnet wird, ein Kontakt ausgelöst und die Maschine sofort abgeschaltet werden. Um auch einen theoretischen Ausfall dieser Sicherheitseinrichtung zu verhindern, sind diese Schalter und Schaltkreise zweikanalig (redundant) ausgeführt.
Um Unfälle durch Kollisionen zu vermeiden, sind die Roboterachsen mit Positionsschaltern ausgestattet, die durch mechanische Nocken aktiviert werden und die Bewegungsfreiheit des Roboters einschränken. Diese teuren Methoden senken die Wirtschaftlichkeit.
Zuverlässig und fehlertolerant
Das Konzept «Safe Move» von ABB ersetzt teure mechanische Schutzvorrichtungen für Roboter durch eine konfigurierbare elektronische Antriebsüberwachung. Es basiert auf neuesten Entwicklungen auf dem Gebiet der sicherheitsgerichteten Software, der elek-tronischen Sicherheitstechnik und den neuesten Sicherheitsvorschriften. Das System ermöglicht eine zuverlässige und fehlertolerante Überwachung der Geschwindigkeit und Position des Roboters sowie die Erkennung ungewollter oder verdächtiger Abweichungen. Wird ein Sicherheitsrisiko erkannt, führt «Safe Move» einen Nothalt durch, der den Roboter in Bruchteilen einer Sekunde zum Stillstand bringt.
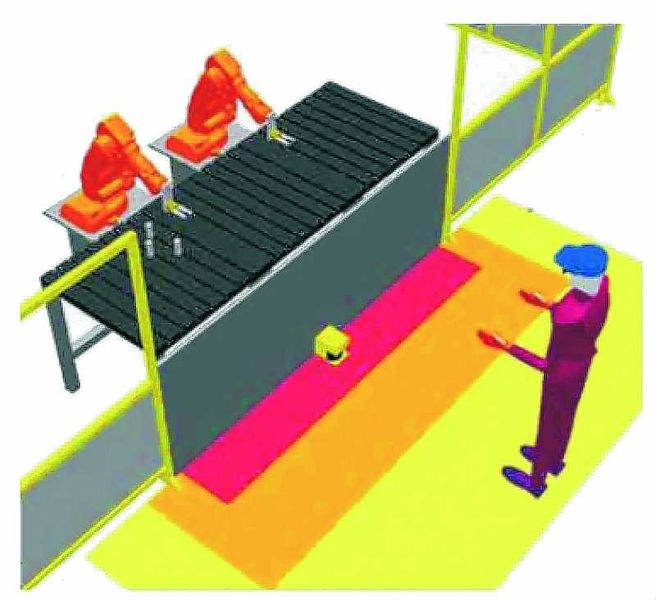
Mit programmierbaren Sicherheitszonen kann sichergestellt werden, dass der Roboter ausserhalb geschützter Zonen bleibt. Diese Zonen können komplexe dreidimensionale Formen haben, die man an die jeweilige Anlage anpassen kann.
So können die Zäune viel näher am Roboter platziert und wertvolle Standfläche kann eingespart werden. Natürlich ist es auch möglich, die Reichweite der Roboterachsen zu begrenzen. Dazu ahmt eine Software die herkömmlichen elektromechanischen Positionsschalter nach. Dies ist aber nicht nur auf die drei Hauptachsen des Roboters beschränkt, sondern ist für alle sechs Achsen möglich.
Sicherheit für den Menschen
Im «sicheren Stillstand» werden alle Bewegungen des Roboters vollständig unterdrückt, obwohl alle Antriebe mit Spannung versorgt und die Motoren aktiv geregelt sind. In dieser Betriebsart kann sich ein Arbeiter dem Roboter gefahrlos nähern, ohne dass der Roboter abgeschaltet werden muss. Dies verkürzt nicht nur die Zykluszeit bei der Wiederaufnahme des Betriebs, sondern schont auch die Bremsen und Schütze, die durch das Abschalten beansprucht werden.
In der Betriebsart «sichere Geschwindigkeit» kann sich der Roboter mit einer geringen Geschwindigkeit bewegen, sodass er keine Gefahr für den Arbeiter darstellt. Damit kann sogar vollständig auf Zäune verzichtet werden.
Technische Umsetzung
«Safe Move» verwendet die für die Bewegungssteuerung bereits vorhandenen Sensoren, um die Stellung des Motors zu über-wachen. Dann berechnet das System auf einem von der Robotersteuerung unabhängigen Computer dessen Position. Ein separates Modell der Robotermechanik und eine zusätzliche logische Prüfung des nominellen Verhaltens des Servo-Regelkreises sorgen für zusätzliche Sicherheit.
Obwohl «Safe Move» auf einem unabhängigen Computer im Schaltschrank der Industrierobotersteuerung IRC 5 läuft, ist das System aus Anwendersicht nahtlos integriert. Ereignisse, Alarme und Zustandsänderungen werden im Flash-Speicher des Controllers protokolliert. Der Zustand der sicheren Ein- und Ausgänge kann – wie die normalen Roboter-E/A – ausgelesen und vom Roboterprogramm verwendet werden, obwohl es keine physikalische Verdrahtung zwischen den E/A-Systemen gibt. Stattdessen kommunizieren «Safe Move» und die IRC 5 über eine interne Netzwerkverbindung miteinander.
Keine mechanischen Anschläge
Roboter arbeiten häufig mit gefährlicher Prozessausrüstung wie Schweisszangen, Laserköpfen, Wasserstrahldüsen und sogar radioaktiven Strahlungsquellen. Bei diesen Geräten sind für den Fall einer Störung besondere Massnahmen erforderlich. Dank der Funktionen von «Safe Move» sind deutlich weniger Sicherheitseinrichtungen (Lichtschranken, Sicherheitsrelais, mechanische Positionsschalter) erforderlich.
Durch den Wegfall mechanischer Positionsschalter für Roboter und zusätzliche Achsen sinkt ausserdem der Wartungsaufwand und die Roboterzellen können kompakter ausgeführt werden. Die Möglichkeit, die Sicherheitskonfigurationen einfach mit der Software zu ändern, trägt zu einer höheren Flexibilität bei. Heute lassen sich solche Reparaturen viel schneller durchführen, da die Sicherheitsparameter vom Controller behandelt werden und es keine mechanischen Anschläge mehr gibt.
Infoservice
ABB Schweiz AG, Robotics
Badenerstrasse 780, 8048 Zürich
Tel. 058 586 00 00
www.abb.ch/robotics