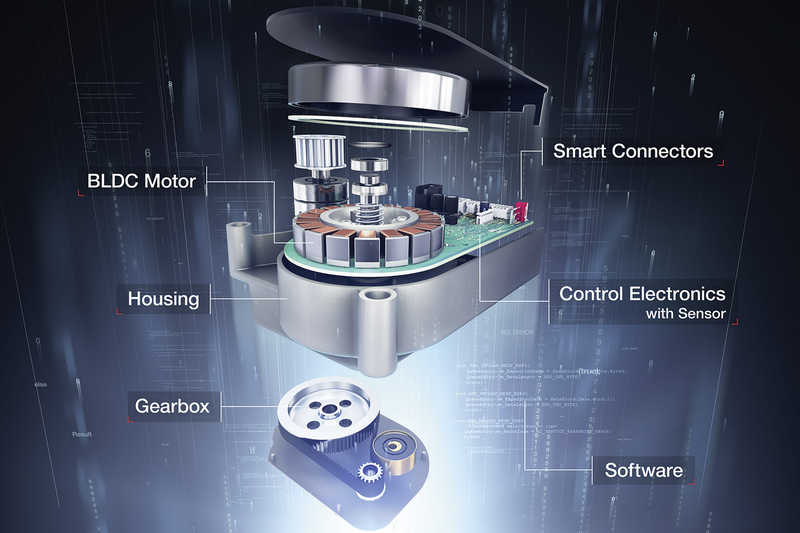
Der Fokus liegt auf der zu erfüllenden Gesamtfunktion und nicht mehr auf den im Detail verwendeten Komponenten, wie folgendes Beispiel eines Roboterhüftgelenks zeigt.
Ausgangslage ist ein kundenspezifisch angepasster Flachmotor. Zur besseren Kühlung ist der Rotor mit Löchern versehen. Zudem ist ein spezieller Kabelanschluss mit Stecker gefordert, um die vom Kunden beigestellte Motorsteuerung einzubinden. Die Motorfunktion, seine mechanischen und elektrischen Schnittstellen sind erst nicht bekannt. Intensivere Kundenkontakte ergeben, dass der Motor ein Robotergelenk über ein Getriebe antreibt. Hier bietet sich eine integrierte Gesamtlösung an, denn es herrschen stark eingeschränkte Platzverhältnisse, die Montagesituation der bestehenden Lösung ist komplex und mehrere Zusatzfunktionen werden benötigt.
Mechanische und elektrische Anforderungen
Kleine Drehzahlen und hohe Drehmomente verlangen folgende Motorgetriebelösung:
- Bewegungsumfang am Getriebeabgang ca. 120 °
- Blockieren des Gelenks bei Stromausfall (Haltebremse)
- Möglichkeit, die Blockade zu lösen; System darf nicht selbsthemmend sein
- Kabeldurchführung für Leitungen, die durch die Hüfte gehen
- Ansteuerung des bürstenlosen Motors – Kommutierung, Strom- und Drehzahlregelung
- Kommunikation mit übergeordneter Steuerung
- Winkelsensor im Motor und am Getriebe-abgang, Positionsinformation geht an übergeordnete Steuerung
Eingeschränkte Platz- und Gewichtsverhältnisse
All dies findet im Kontext eingeschränkter, vorgegebener Abmessungen und Gewichtsverhältnisse statt. Im Weiteren sind die Emissionen (Temperatur, Vibrationen, Geräusche) klein zu halten. Da der Antrieb batteriebetrieben ist, soll er möglichst energieeffizient arbeiten. Und natürlich sind die Kosten zu berücksichtigen. Diese Anforderungsliste zeigt exemplarisch die Aspekte, die es bei einer integrierten Lösung zu beachten gilt und die nur mit intensivem und offenem Gedankenaustausch zwischen Kunde und Systemlieferant geklärt werden können.
Systemabgrenzung ist nötig
Zunächst stellt sich die Frage, was alles zum System gehören soll. Wo sind sinnvolle Systemgrenzen anzusetzen unter Berücksichtigung der zu erreichenden Funktionalität? Wie sieht die Systemumgebung, wie die elektrischen, mechanischen Schnittstellen aus? Wie werden die Informationen ausgetauscht und wie kommuniziert der Endbenutzer bei Gesamtsystemen?
Sichtweisen auf Systeme
Bei der Entwicklung von komplexeren Systemen sind meist Personen mit unterschiedlichen Sichtweisen und unterschiedlichem Wissenshintergrund beteiligt. Wie kann man die Kommunikation optimal gestalten, so dass alle dasselbe verstehen und dieselben Ziele verfolgen? Eine Black-Box-Betrachtung, wie skizziert, kann helfen. Sinnvoll ist auch eine Top-down-Herangehensweise, die sich nicht in Details verliert. Ein weiterer Aspekt, der häufig bei Gesamtsystemen vernachlässigt wird: Wie können die Bedürfnisse des Endanwenders berücksichtigt werden?
Systeme spezifizieren
Der Auslöser für eine Systementwicklung kann wichtige Hinweise zur Formulierung des Zielkatalogs enthalten. Ist es eine Neuentwicklung? Geht es um die Verbesserung einer bestehenden Lösung? Warum ist die bestehende Lösung unbefriedigend? Grundlage einer Spezifikation ist immer eine Situationsanalyse: Worum geht es und welche Ziele sollen erreicht werden? Wie sieht der Systemkontext aus? Wichtig ist, dass der Zielkatalog lösungsneutral formuliert wird. Zum Beispiel kann man sich im obigen Beispiel fragen, ob das Blockieren bei Stromausfall nur mittels Haltebremse erreicht werden kann oder vielleicht auch durch ein selbsthemmendes Getriebe.
Vom Zielkatalog zu verschiedenen Lösungsvarianten
Der Zielkatalog dient als Basis, um Lösungsvarianten zu erarbeiten, die dann auf ihre Tauglichkeit beurteilt werden. Mögliche Lösungen basieren häufig auf bestehenden Produkten. In diesem Zusammenhang sind die von maxon motor entwickelten Produktplattformen wichtig. Sie erlauben bei der Systementwicklung einen Rückgriff auf bestehende und erprobte Komponenten, die zudem rasch angepasst werden können. Dies verkleinert das Entwicklungsrisiko in technischer, zeitlicher und ökonomischer Hinsicht.
Systeme von maxon motor sind meist im mechatronischen Umfeld zu Hause. Sie verbinden mechanische und elektronische Komponenten: Mechanik, Aktuatoren, Sensoren, Kontroller. Dabei spielt die Software eine immer wichtigere Rolle, zum Beispiel in Form von Kontroller-Firmware oder als Programm, das eine ganze Anlage steuert. Bei der Beurteilung von Lösungsvarianten ist sicherzustellen, dass Gleiches mit Gleichem verglichen wird. Zum Beispiel sind für den Kunden die Kosten für ein Gesamtsystem im Vergleich zu den Kosten für individuelle Komponenten unter Berücksichtigung der Mehraufwände für Schnittstellen und Montage aufzurechnen.
Ökonomische Randbedingungen sind zu beachten
Integraler Bestandteil der Situationsanalyse ist, ob und wann sich eine Neuentwicklung lohnt. Welche Stückzahlen sind in welcher Zeit zu erwarten? Dazu sind realistische Marktabschätzungen nötig. Es muss geklärt werden, ob die Entwicklungs- und Werkzeugkosten auf den Produktpreis geschlagen oder separat als einmalige Fixkosten (NRE-Kosten/non recurring engineering costs) abgerechnet werden. Grundsätzlich kann eine Wirtschaftlichkeitsberechnung (NPV/net present value) als Basis zur ökonomischen Projektbeurteilung dienen. Weitere Kriterien sind der «Strategic Fit» und eine Risikoabschätzung.
Übrigens
Die vorgeschlagene Lösung für das Roboterhüftgelenk besteht aus dem ursprünglich gewählten Flachmotor – allerdings mit integrierter elektronischer Ansteuerung (auf Basis eines maxon-ESCON-Controllers) und kombiniert mit einem Sondergetriebe. Motor- und Getriebepositionen werden über integrierte Encoder ermittelt. Die speziell konstruierte Haltebremse wirkt direkt auf den Motorrotor und ist im kompakten Gehäuse untergebracht. Für den Kunden vereinfacht und verkürzt sich die Montage erheblich gegenüber der vorherigen Lösung aus Einzelkomponenten.
Infoservice
maxon motor ag
Brünigstrasse 220, 6072 Sachseln
Tel. 041 666 15 00, Fax 041 666 16 50
info@maxonmotor.com, www.maxonmotor.com
Hannover Messe: Halle 15, Stand D09