Wo bisher eine externe Überwachung der Antriebe nötig war – die es zusätzlich zum Antriebssystem aufzubauen und zu zertifizieren galt – bringen moderne Antriebssysteme elementare Sicherheitsfunktionen wie Safe-Torque-Off (STO) mit sicherer Bremsenansteuerung (SBC) «on board» mit. Zunehmend stehen jedoch auch Antriebe mit fortgeschrittenen integrierten Sicherheitsfunktionen wie Safe-Operating-Stop (SOS), Safely-limited-Speed (SLS) und Safe-Speed-Monitor (SSM) zur Verfügung. Sie vereinfachen die Bereitstellung innovativer, Produktivität steigernder Einricht- und Rüstfunktionen.
Ein wesentlicher Vorteil dabei ist, dass diese Sicherheitsfunktionen bereits ab Werk zertifiziert sind. Die sicherheitstechnische Abnahme der Maschine bzw. Anlage wird dadurch entscheidend vereinfacht, im Systemverbund mit sicherheitsgerichteten Steuerungen lässt sie sich sogar zu einem guten Teil automatisieren. Seit 2007 ist das Profidrive-Profil in der IEC 61800-7 genormt (siehe Kasten).
Sicherer Datenaustausch über Standardbus
Mit antriebbasierten Sicherheitsfunktionen ist die vollständige Integration der Sicherheitsfunktionalität in die Standardautomatisierung möglich. Voraussetzung dafür ist, dass die sicherheitsgerichtete Kommunikation über die Standard-Kommunikationswege der Automatisierung erfolgt. Unter Profibus und Profinet gibt es dazu das Profisafe-Protokoll. Es gewährleistet einen im strengen Sinne sicheren Datenaustausch zwischen allen sicherheitsgerichteten Komponenten der Automatisierung – über den Standardbus.
Auch im Profidrive-Protokoll ist ein gesonderter Kommunikationskanal für Profisafe- Telegramme vorgesehen (Bild 1). Von der Abfrage fehlersicherer Eingänge am Antriebsgerät bis hin zum Aktivieren komplexer antriebsautarker Sicherheitsfunktionen lassen sich hierüber alle sicherheitsgerichteten Antriebsfunktionen ansprechen und überwachen – ohne, dass dazu im Anwenderprogramm zusätzliche Vorkehrungen getroffen werden müssen. So ergibt sich softwareseitig eine verbesserte Flexibilität, die man für situationsgerecht differenzierte Sicherheitsreaktionen nutzen kann und die das Umsetzen kundenspezifischer Forderungen an die Maschinensicherheit vereinfacht.
Koordinierte Sicherheitsreaktion im Achsverband
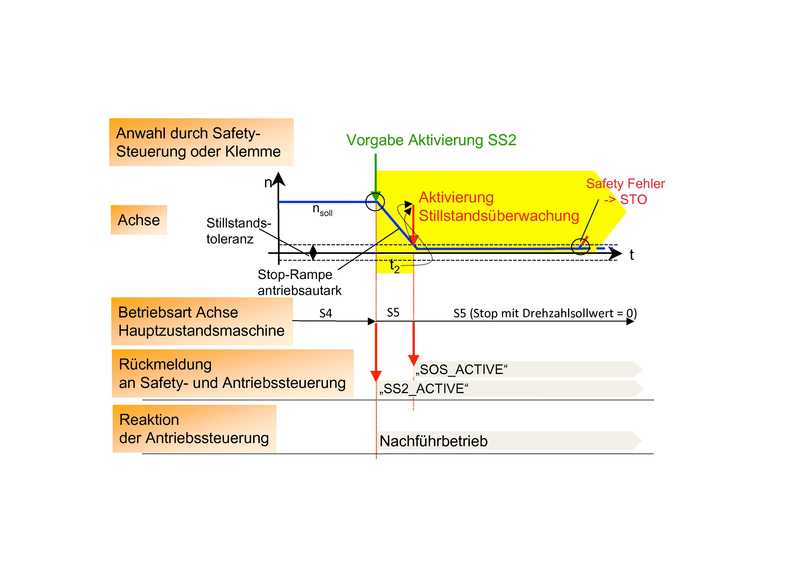
Bei Verbänden koordiniert betriebener Achsen – wie sie unter anderem für Motion-Control-Applikationen und Werkzeugmaschinen typisch sind – ist es wünschenswert, die Synchronbeziehungen zwischen den Achsen auch bei einer Sicherheitsreaktion zu erhalten. Das Auslösen einer Sicherheitsfunktion im Antrieb wirkt auf die Bewegungsführung der Antriebssteuerung zurück (Bild 2). In Abhängigkeit von der jeweils aktiven Safety-Funktion und der Phase der Sicherheitsreaktion muss die Bewegungsführung das Abbremsen bzw. Stillsetzen des Achsverbandes koordinieren – oder (bei antriebsautarken Bewegungen) den Nachführbetrieb aktivieren.
Die Bewegungsführung und andere nicht-sicherheitsgerichtete Teile des Anwenderprogramms laufen jedoch in vielen Automatisierungen auf einer Standard-CPU, nicht auf einer fehlersicheren CPU ab (Bild 3). Zum Erhalt der Achsbeziehungen ist es darum nötig, neben der fehlersicheren Steuerung und den Antrieben auch die Standardsteuerung in die Kommunikation zur Sicherheitsreaktion einzubeziehen. Dies ist bei der Definition der antriebsbasierten Sicherheitsfunktionen im Profidrive-Profil berücksichtigt.
Gesicherter Kommunikationskanal zur F-Steuerung
Ein Profidrive-Antrieb ohne Sicherheitsfunktionen verfügt über einen Standardkommunikationskanal zwischen Antrieb und Antriebssteuerung, z. B. einer Motion-Control-CPU. Über diesen Kommunikationskanal startet die Steuerung den Antrieb und gibt Sollwerte für Drehzahl oder Lage vor (Bild 3). Die hierfür notwendigen Prozessdaten sind als Profidrive-Signale definiert. Die Signale einer Achse bilden ein Profidrive-Telegramm.
Verfügt der Antrieb zusätzlich über Sicherheitsfunktionen, ist im Antrieb ein «Drive Safety Process» präsent, der in sicherer Technik ausgeführt ist. Zur Ansteuerung der antriebsbasierten Sicherheitsfunktionen über das Bus-Interface bauen Profisafe-kompatible Antriebe einen gesicherten Kommunikationskanal zur übergeordneten, fehlersicher ausgeführten Sicherheitssteuerung (F-Steuerung) auf (Bild 3). Unter Profibus ist dies ein zusätzlicher Kommunikations-Slot, in Profinet-Umgebungen ein zusätzlicher Subslot je Achse. Genutzt wird hierbei das Telegramm 30 des Profidrive-Profils. Über die Signale S_STW1 und S_ZSW1 ermöglicht es die An- und Abwahl von Safety-Funktionen des Antriebs sowie deren Diagnose.
Die – nicht zwingend fehlersicher ausgelegte – CPU, welche die Antriebssteuerung beziehungsweise Bewegungsführung zur Aufgabe hat, wird mit dem Statuswort S_ZSW1B über die Anwahl und den aktuellen Status einer Sicherheitsreaktion informiert und kann entsprechend reagieren. Da das Statuswort S_ZSW1B gegenüber dem (Standard-)Anwenderprogramm aus sicherheitstechnischer Sicht lediglich eine informative Funktion besitzt, genügt es, dass der Antrieb dieses Statuswort über einen Standardkommunikationskanal an die Antriebssteuerung weiterleitet (Bild 3).
Infoservice
Informationstechnische Gesellschaft ITG
Tel. 044 956 11 83, Fax 044 956 11 22