Von den Eigenschaften magnetischer Direktantriebe profitieren zahlreiche Anwendungsgebiete: von der Halbleiterfertigung, Biotechnologie und Medizintechnik über Kippspiegel-, Dosier-, Prüf- und Fokussieranwendungen bis hin zu Photonik oder Weltraumtechnik. Die Antriebe überzeugen unter anderem durch relativ grosse Stellwege, hohe Geschwindigkeiten und lange Lebensdauer. Damit eignen sie sich für industrielle Anwendungen, die einen «Rund-um-die-Uhr-Betrieb» verlangen.
Zudem sind sowohl Positions- als auch Kraftregelung möglich. In Kombination mit einem digitalen Controller lassen sich Aufgaben im Automatisierungsverbund lösen, die schnelle, sub-mikrometergenaue Positionierung und geregelte Aktorkraft erfordern.
Unterschiedliche Technologien
Für magnetische Direktantriebe sind unterschiedliche Antriebstechnologien geeignet. Voice-Coil-Aktoren und magnetische Linearantriebe beispielsweise machen sich die Tatsache zunutze, dass sich die Kraft auf einem stromdurchflossenen Leiter in einem Magnetfeld proportional zur Magnetfeldstärke und zum Strom verhält. Die elektrische Energie wird in mechanische Energie umgewandelt und erzeugt eine Kraft, die je nach Stromrichtung bidirektional wirken kann. Voice-Coil-Antriebe verfügen über eine hohe Dynamik, aber relativ geringe Haltekräfte und Stellwege. Sie kommen als reibungsfreie Linearantriebe besonders bei Scananwendungen mit Stellwegen bis zu einigen zehn Millimetern zum Einsatz.
Eisenlose Linearmotoren entsprechen einer Aneinanderreihung mehrerer Voice-Coil-Aktoren; einzelne Spulen lassen sich nach positionsabhängigem, festgelegtem Muster ansteuern (Kommutierung). Dabei bewegt sich entweder die Spulen- oder die Magnetbaugruppe, sie erreichen praktisch eine unbegrenzte Anzahl Hübe. Solche Motoren eignen sich sowohl für sehr hohe als auch für sehr geringe Vorschubgeschwindigkeiten und sie arbeiten präzise in einem Bereich von unter 0,1 μm/s bis zu über 5 m/s. In Kombination mit Luft- oder Magnetlagern ist eine Positionsauflösung bis zu wenigen Nanometern erreichbar.
Aufgrund der Stromsteuerung und der linearen Abhängigkeit der Antriebskraft zum Strom ist für magnetische Direktantriebe nicht nur eine Positions- oder Geschwindigkeitsregelung möglich, sondern auch eine mittels Kraft. Die Kraftregelung ermöglicht den Betrieb von magnetischen Antrieben und Verstellern mit definierter Halte- oder Vortriebskraft. Die Kraft- und Positionssensoren werden gleichzeitig ausgelesen und die Werte verarbeitet. Dadurch ergeben sich neben der reinen Kraftregelung die Optionen einer unterlagerten Positions- und Geschwindigkeitsregelung. Eine Auto-Zero-Funktion legt den Haltestrom fest, bei dem der Antrieb im ungeregelten Betrieb eine Kraft von 0 N aufbringt, zum Beispiel für die Kompensation der Gewichtskraft.
Flexibel auf die jeweilige Anwendung anpassbar
Ein typischer Vertreter dieser Klasse ist der magnetische Linearversteller V-273, der optional mit einem eigens entwickelten Kraftsensor verfügbar ist. Bei ihm beträgt die Kraftauflösung 0,025 N, also umgangssprachlich 2,5 Gramm. Die Ansteuerung über einen digitalen Motion Controller realisiert Aufgaben im Automatisierungsverbund, die sowohl eine schnelle Positionierung im Bereich von einzelnen Mikrometern und darunter erfordern als auch eine geregelte Aktorkraft. Eine typische Anwendung ist die Funktionsprüfung von Bedienelementen und Sensoren.
Da gerade im Bereich der Präzisionspositionierung die Anwendungen unterschiedliche Anforderungen an die Antriebe und Positioniersysteme stellen, passt Physik Instrumente (PI) alle Systemkomponenten wie Motor, Messsystem, Führungstechnologie oder Ansteuerung auf die jeweiligen Anforderungen an. Dies erzielt eine ähnliche Technologietiefe und Flexibilität, wie bei den piezokeramischen Antrieben des gleichen Herstellers. Zusammen mit den Kenntnissen über Regelungstechnik, Führungssysteme und Nanometrologie-Sensorik sind so auch bei den magnetischen Direktantrieben individuelle Lösungen möglich. Für den Anwender macht es dann praktisch keinen Unterschied, nach welchem Antriebsprinzip sein Positioniersystem arbeitet. Er erhält eine auf die Applikation massgeschneiderte Positionierlösung, einschliesslich der notwendigen Controller und Sensorik, beispielsweise kapazitive, absolut messende Sensoren oder optische Encoder.
Antriebslösung hängt vom Zusammenspiel vieler Parameter ab
Für die Wahl des idealen Antriebskonzepts für eine Positionieranwendung gibt es kein Patentrezept. Welche Antriebslösung sich am besten eignet, ist vom Zusammenspiel vieler Parameter abhängig, die die konkrete Anwendung vorgibt.
Rotationsversteller beispielsweise nutzen als Direktantrieb Torque-Motoren. Sie überzeugen vor allem durch ihre hohe Dynamik und Positionsauflösung und werden zum Beispiel in der Materialforschung für die Probenbewegung eingesetzt und können hinsichtlich ihrer Belastbarkeit frei skaliert werden. Sie erreichen Geschwindigkeiten bis 360 °/s; integrierte Encoder ermöglichen eine direkte Positionsmessung und als Option ist eine Luftlagerführung möglich, was beispielsweise in Präzisionsmaschinen für einen reibungsfreien Betrieb sorgt.
Spezielle Antriebstechnologien erzielen hohe Dynamik
Spezielle Lösungsansätze erreichen über die Standardtechnologien wie Voice Coil und Linearmotor hinaus eine weitere Optimierung der Lösung vor allem in Bezug auf Kraftdichte, Energieeffizienz und Baugrösse. Hier setzt PI beispielsweise auf Resonanzantriebe mit bis zu 60 g Beschleunigung oder auf Reluktanz-antriebe für extrem kompakte Bauformen. Spezielle Magnetanordnungen (etwa Halbach Arrays) können zur Gewichtsreduzierung der bewegten Komponenten beitragen, was abermals optimale Dynamik und Wirkungsgrad ermöglicht.
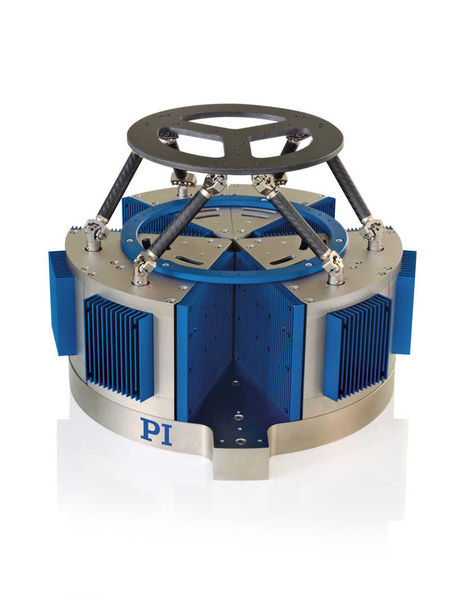
Beste dynamische Eigenschaften erreichen Hexapoden mit magnetischen PIMag-Direktantrieben. Hier sind Geschwindigkeiten von mehreren hundert mm/s und Beschleunigungen bis zu 4 g realisierbar. Das spezielle Design mit Festkörpergelenken verzichtet auf rollende und reibende Elemente und ermöglicht eine spielfreie Bewegung ohne mechanisches Rauschen. Unerwünschte Störfrequenzen aus der Hexapod-Mechanik beeinflussen also die Messung nicht. Automatisierte Testzyklen bei der Bewegungssimulation mit hohen Frequenzen lassen sich mit grosser Beschleunigung und Geschwindigkeit realisieren. Gleichzeitig ist ein präzises Folgen vorgegebener Trajektorien möglich.
Magnetisch geführte Systeme können im Vakuum arbeiten
Ein weiteres Beispiel, was sich mit elektromagnetischen Antrieben realisieren lässt, liefert der PIMag 6D. Bei diesem Positioniersystem schwebt der passive Läufer auf einem magnetischen Feld und wird durch dieses aktiv. Objekte lassen sich auf diese Weise mit bisher unerreichter Führungsgenauigkeit (aktive Linearführung) in der Ebene linear bzw. rotativ bewegen. Ein wesentlicher Vorteil dieses Prinzips ist das Fehlen eines mechanischen Kontaktes im Antriebsstrang und der Führung; es gibt folglich keine Reibung.
Weil es keine Reibung gibt, entsteht auch kein Abrieb, der den Arbeitsraum verunreinigen könnte. Ausserdem sind keine Schmiermittel notwendig; dadurch können diese magnetisch geführten Systeme gut im Vakuum oder unter Stickstoffatmosphäre arbeiten. Bahnbewegungen sind bei einer Beschleunigung von bis zu 2 m/s2 und einer Geschwindigkeit von derzeit bis zu 100 mm/s mit Nanometerpräzision realisierbar. Den magnetischen Direktantrieben werden sich so zukünftig viele weitere Einsatzbereiche in modernen Antriebslösungen erschliessen.
Infoservice
Dyneos AG
Vogelsangstrasse 15, 8307 Effretikon
Tel. 052 355 12 40, Fax 052 355 12 44
info@dyneos.ch, www.dyneos.ch